

Event date:
Mar
3
2021
3:30 pm
Platform Development, Bank Detection and Trajectory Estimation for an Unmanned Surface Vehicle Deployed in an Open Water Channel
Supervisor
Dr. Abubakr Muhammad
Student
Muhammad Mateen Shahid
Venue
Zoom Meetings (Online)
Event
MS Thesis defense
Abstract
Water is at the core of sustainable growth and is essential to decrease the global burden of disease and increase the health, welfare, and productivity of populations. Agriculture is the biggest consumer of water reserves and faces the most comprehensive water availability and quality challenges. For excellent agriculture requirements, the land assigned for agriculture needs an appropriate irrigation system. The framework of the central part of the irrigation system of Pakistan is distributed through channels that are outpourings of dams, barrages, and rivers. The manual labor for assessing and investigating the situation of waterways and afterward servicing during the closure period every year cannot be conceivable by arduous manual examination. Henceforth, there is a necessity for mechanization in examination assignments identified with the water channels. The ability to move robots to achieve desired tasks with the assistance of two or three sensors mounted on them diminishes calculation time and ensures task completion.
This objective can be accomplished by generating a three-dimensional map of the environment using various sensors. The map can help navigate the canal by avoiding obstacles by floating or aerial vehicles. Such a mechanism can be used for confined pose ambiguity and allow map construction that is extensible and adaptive to environmental variations.
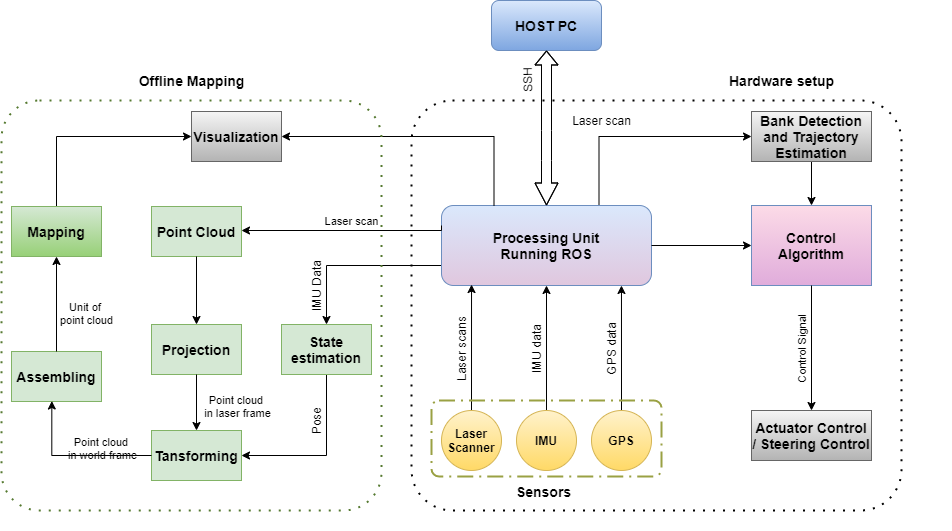
In this thesis, we develop a floating platform that is equipped with sensors to collect long-range data of a waterway such as an irrigation canal and its surroundings by navigating through it and collecting the data. This data can be utilized to carry out a variety of tasks and extract useful information. The core purpose of collecting the data is to get a map of the environment. The developed mobile robot will explore the unexposed surroundings while automatically keeping itself in the center of the canal using bank detection through a Lidar sensor. The canal bank detection is an essential step for trajectory planning and robust control design. This thesis also contributes to the detection of the canal banks and find its center. Canal center is the trajectory the floating platform should follow for efficient map construction that is extensible and adaptive to environmental changes. After that, a simple distance-based control algorithm is introduced, which decides control commands based on Lidar and IMU's feedback. The algorithm is tested on the pre-recorded data
Further, we develop a mechanism for the control of actuators to perform autonomy. A mathematical model that can be used in model-based controller and geometrical relationships between sensors to the floating platform and using these relations for data transformation, which helps map construction, is also discussed in this work. In the later part of the thesis, we try to build a point cloud Map based on a pre-recorded data using scan matching algorithm.
This objective can be accomplished by generating a three-dimensional map of the environment using various sensors. The map can help navigate the canal by avoiding obstacles by floating or aerial vehicles. Such a mechanism can be used for confined pose ambiguity and allow map construction that is extensible and adaptive to environmental variations.
In this thesis, we develop a floating platform that is equipped with sensors to collect long-range data of a waterway such as an irrigation canal and its surroundings by navigating through it and collecting the data. This data can be utilized to carry out a variety of tasks and extract useful information. The core purpose of collecting the data is to get a map of the environment. The developed mobile robot will explore the unexposed surroundings while automatically keeping itself in the center of the canal using bank detection through a Lidar sensor. The canal bank detection is an essential step for trajectory planning and robust control design. This thesis also contributes to the detection of the canal banks and find its center. Canal center is the trajectory the floating platform should follow for efficient map construction that is extensible and adaptive to environmental changes. After that, a simple distance-based control algorithm is introduced, which decides control commands based on Lidar and IMU's feedback. The algorithm is tested on the pre-recorded data
Further, we develop a mechanism for the control of actuators to perform autonomy. A mathematical model that can be used in model-based controller and geometrical relationships between sensors to the floating platform and using these relations for data transformation, which helps map construction, is also discussed in this work. In the later part of the thesis, we try to build a point cloud Map based on a pre-recorded data using scan matching algorithm.
Zoom Link: https://zoom.us/j/91924541816
Meeting ID: 919 2454 1816

![]()
Connect
![]()
![]()
![]()
![]()
![]()